In recent years, researchers at Purdue University and the Massachusetts Institute of Technology (MIT) have been focusing on developing a new generation of robotic grippers that are simpler and yet equally effective at handling complex object manipulation tasks. These robotic grippers are inspired by human hands but have fewer degrees of freedom (DOF) than traditional humanoid robotic hands.
The New Gripper Design
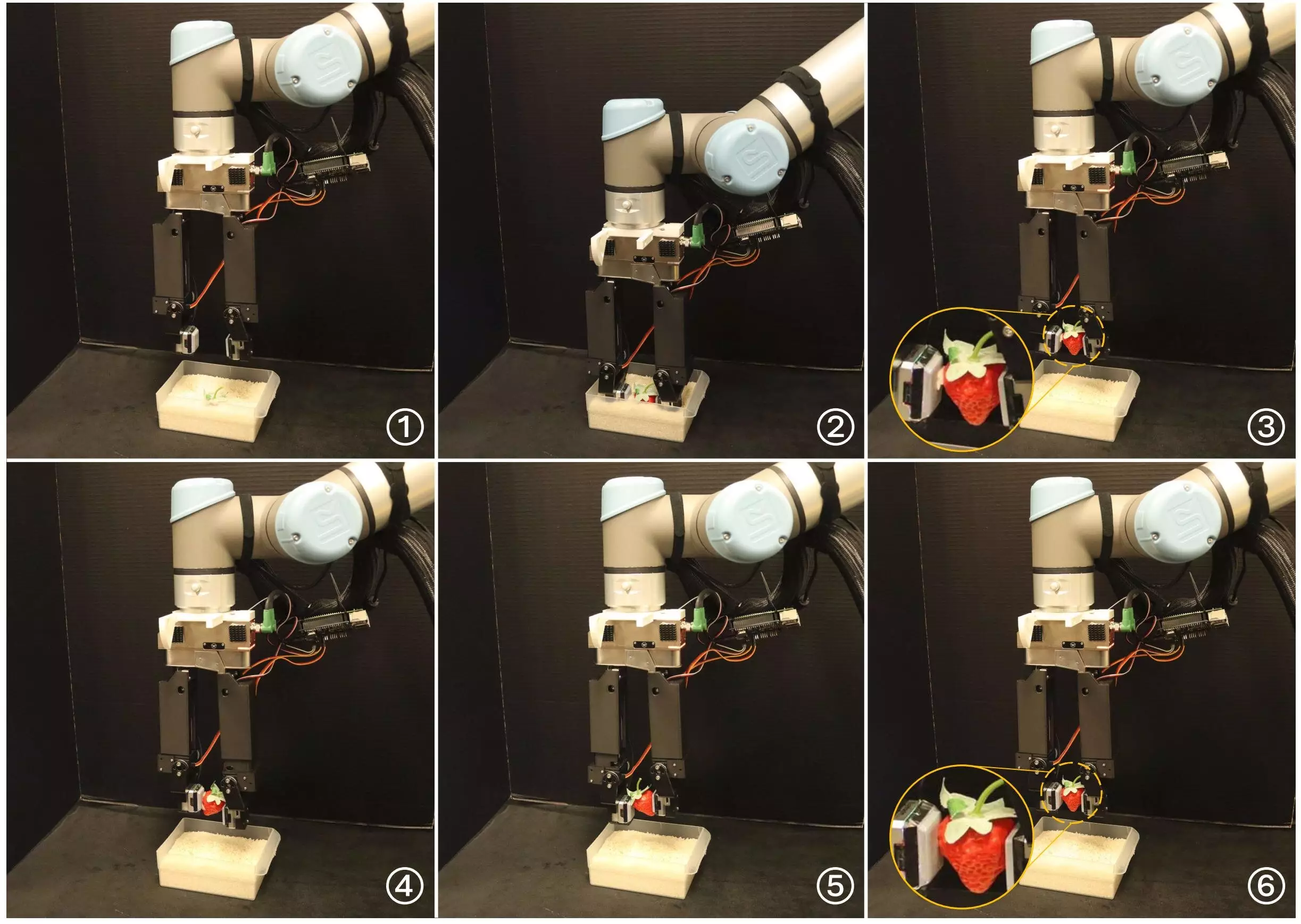
The newly designed gripper consists of two fingers attached to a gripper-base, with a total of 5 DOF. This design allows for easier control through programming tools, while still enabling human-like in-hand manipulations. The gripper is equipped with a vision-based tactile sensor that provides information about the geometry, orientation, and grip force of the grasped object.
Despite having fewer DOF than conventional robotic hands, the gripper developed by the research team is able to achieve a high level of dexterity during in-hand manipulation tasks. Through a combination of its 5 DOF, the gripper can effectively complete tasks such as singulation and scooping, mimicking human motions in handling objects.
The researchers conducted a series of real-world experiments to evaluate the performance of the gripper. They found that it surpassed the basic manipulation capabilities of simple grippers with fewer DOF, demonstrating its ability to successfully complete intricate object manipulation tasks. The gripper’s versatility was showcased in tasks like rubbing away sand particles stuck between surfaces, similar to actions performed by humans on the beach.
Future Applications
The robotic gripper developed by the research team has the potential to be further developed and applied in a variety of complex object manipulation tasks. Its simplified design could pave the way for more cost-effective and energy-efficient robotic solutions. The team plans to explore more challenging manipulation tasks that are currently beyond the capabilities of existing robotic grippers, utilizing the capabilities of the tactile gripper.
Overall, the development of simpler robotic grippers with enhanced dexterity opens up new possibilities for the field of robotics. By bridging the gap between high DOF humanoid hands and low DOF grippers, these innovative designs offer a more practical and efficient solution for a wide range of real-world applications. The future of robotic grippers lies in leveraging simplicity and effectiveness to streamline complex object manipulation tasks.
Leave a Reply