The field of robotics is continuously evolving, with researchers exploring ways to enhance the capabilities of robots for various applications. One approach that has gained significant attention is the use of teams of robots to tackle complex missions. Teams of robots have the potential to cover long distances faster, visit multiple sites simultaneously, and monitor larger geographical areas. To facilitate research in this area, the University of Cambridge has introduced the Cambridge RoboMaster platform, which offers a promising solution for multi-robot research.
The Cambridge RoboMaster platform, as outlined in a recent paper pre-published on arXiv, consists of a fleet of customized RoboMaster wheeled robots and software to simulate and train the robots on specific tasks. The platform aims to develop solutions for collective intelligence in multi-robot and multi-agent systems by incorporating methods from machine learning, planning, and control. This research has a wide range of applications, including automated transport, logistics, environmental monitoring, and search and rescue.
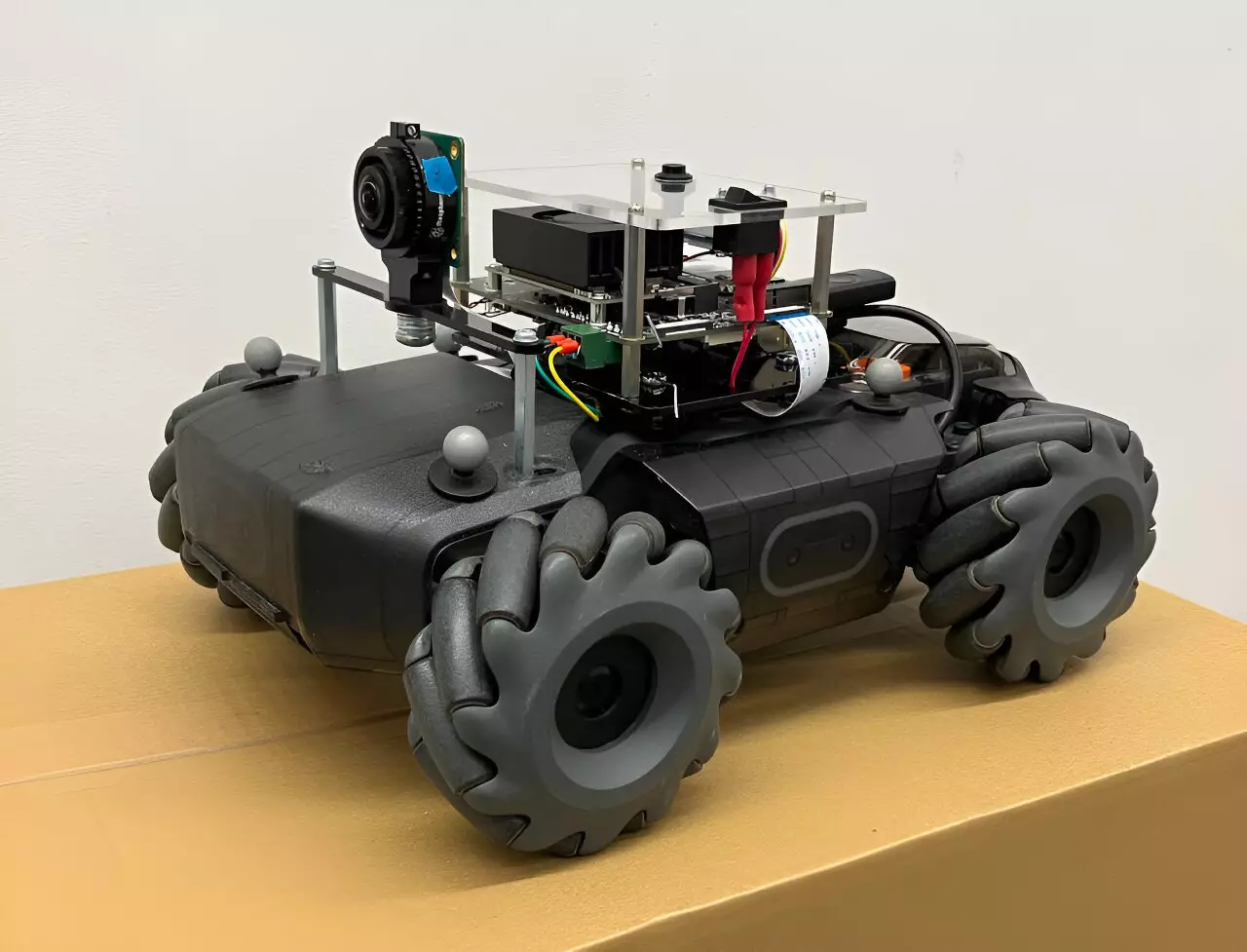
The researchers at the University of Cambridge, led by Principal Investigator Amanda Prorok, set out to develop a multi-robot research platform that met specific requirements, such as state-of-the-art computing power, speed, agility, and durability. To meet these requirements, they chose to use customized versions of DJI RoboMaster S1 robots. These small wheeled robots, originally designed for high school and university-level competitions, provided a solid foundation for building upon to meet the researchers’ needs.
Over the past three years, the researchers have continuously worked on improving the capabilities of the Cambridge RoboMaster platform. They have added more capable computers, sensors, and control software, allowing the platform to be employed in multiple projects and competitions. By enhancing the DJI RoboMaster S1 robots, the researchers were able to create a compact and powerful robotic platform ideal for advancing multi-agent research.
One of the key advantages of the Cambridge RoboMaster platform is its balance between size and capabilities. The customized DJI RoboMaster S1 robots fill the gap between smaller robots with limited computing power and larger, more expensive robots unsuitable for indoor deployment. The platform includes a control stack for full on-board autonomy, peer-to-peer communication, and the ability to run multi-agent reinforcement learning policies directly from a simulation framework. Additionally, the cost-effectiveness of the platform, priced at around $700, makes it accessible for researchers worldwide.
The researchers have tested the Cambridge RoboMaster robots in various scenarios, demonstrating their power-efficiency and versatility. The robots have successfully navigated both indoor and outdoor environments on smooth terrains, showcasing their agility and reliability. While the platform may not be intended for real-world deployment, it serves as an ideal research tool for testing algorithms applicable in multi-agent navigation, relevant for domains such as warehouse automation and logistics.
The Cambridge RoboMaster platform has proven to be a highly versatile, reliable, and accessible testbed for multi-robot research. With the hardware, software, and simulation tools available on GitHub, research groups worldwide can now experiment with algorithms for multi-robot applications such as automated transport logistics, environmental monitoring, and search and rescue missions. As researchers continue to enhance and expand the capabilities of this platform, the limits of multi-robot and multi-agent systems research will be pushed further, paving the way for exciting future projects and developments in the field of robotics.
Leave a Reply