Robots have long been seen as the future of automation, with the potential to take over mundane tasks from humans and improve efficiency in various industries. One key method of teaching robots how to perform everyday tasks is through imitation learning. This involves providing detailed human demonstrations to show specific movements that robots can replicate. However, existing teleoperation systems have struggled to effectively process and reproduce complex and coordinated movements performed by humans.
Recently, researchers at the University of California, San Diego introduced Bunny-VisionPro, a groundbreaking teleoperation system designed to enable the teleoperation of robotic systems for bimanual dexterous manipulation tasks. This innovative system aims to simplify the process of collecting human demonstrations for imitation learning, paving the way for more advanced robotics control algorithms.
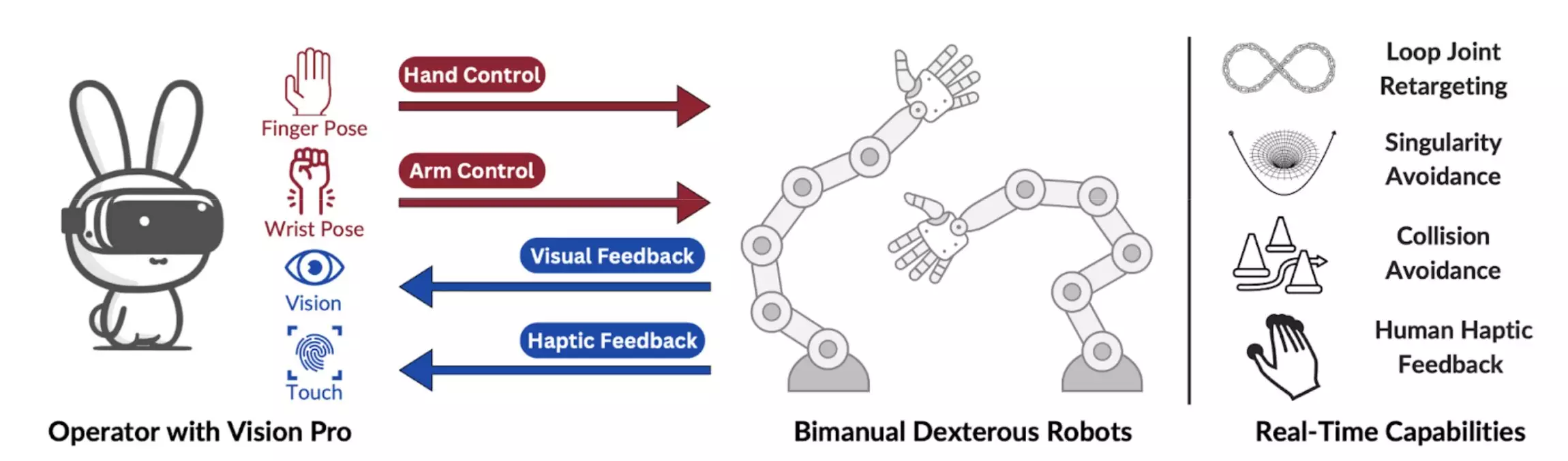
Bunny-VisionPro offers several key components that set it apart from traditional teleoperation systems. One of the main features is its arm motion control module, which allows for the retargeting of human wrist poses to the robot’s end-effector pose. This helps in handling singularity and collision issues, ensuring smooth and safe operation of the robotic manipulator. Additionally, the system includes a hand and motion retargeting module that maps human hand poses to robot hand poses, supporting loop-joint structures for enhanced flexibility.
One of the standout aspects of Bunny-VisionPro is the integration of visual and haptic feedback, providing users with a more immersive teleoperation experience. This real-time feedback allows for better control of the robotic manipulator, reducing latency and preventing collisions with nearby objects. Furthermore, the system’s portability and lightweight design make it easy to install and deploy in laboratory settings, making it an ideal solution for collecting demonstrations in robotics labs.
The primary advantage of Bunny-VisionPro lies in its ability to enable safe and real-time control of bimanual robotic systems. By incorporating haptics and visual feedback, the system enhances the teleoperation success rates and makes the collection of demonstrations more engaging for human users. This balance between safety and performance is crucial for working reliably in real-world robotic applications, setting Bunny-VisionPro apart from other teleoperation systems in the field.
The introduction of Bunny-VisionPro has the potential to revolutionize the field of teleoperation for robotics. As researchers continue to enhance the manipulation capabilities of the system by leveraging the robot’s tactile information, we can expect further advancements in precision and adaptability. With the possibility of deploying Bunny-VisionPro in robotics labs worldwide, there is a growing anticipation for the development of similar immersive teleoperation systems that push the boundaries of robotics research.
Bunny-VisionPro represents a significant leap forward in teleoperation systems, offering a versatile and user-friendly solution for collecting demonstrations for imitation learning frameworks. With its innovative features and potential for future enhancements, Bunny-VisionPro is poised to leave a lasting impact on the field of robotics and automation.
Leave a Reply