The evolution of robotics, particularly in the automotive sector, has garnered significant attention over the past few years. While robots have predominantly serviced industries like manufacturing, their application in logistics and other realms suggests a paradigm shift. Nevertheless, the journey to fully realize the potential of robotics is fraught with challenges. Current robotic designs are limited in functionality; they often execute only singular or pre-defined tasks with little to no variation. For robots to become indispensable in diverse settings, they must emulate human capabilities more closely, showing aptitude in rapid physical engagement, spatial awareness, and adaptability to dynamic environments.
Recent conversations with Alessandro Saccon, an Associate Professor specializing in nonlinear control and robotics at Eindhoven University of Technology (TU/e), shed light on significant advancements in this field. His work on the I.AM project specifically delves into enhancing robots’ ability to engage physically with their surroundings. Saccon emphasizes that certain tasks—such as lifting heavy luggage at airports, operating in hazardous nuclear facilities, or responding to emergencies—are better suited for machines rather than humans due to safety and ergonomic concerns. Moreover, the vision of deploying robots for extraterrestrial exploration showcases the expansive possibilities of robotic applications.
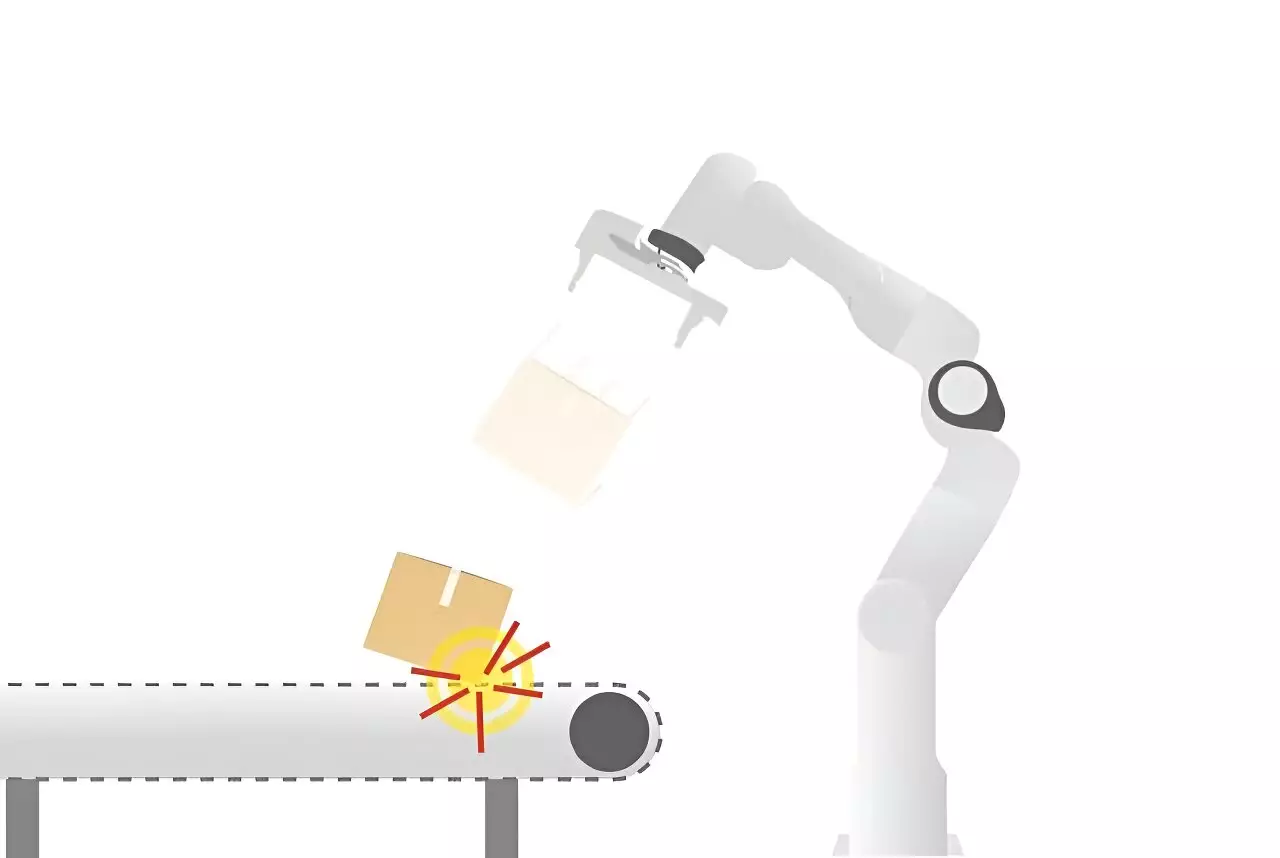
However, despite these advancements, robots often interact with their environment in a rather static manner, which hampers performance in tasks requiring speed and precision. The project focused on developing robots that are “impact-aware,” enabling them to make swift, informed decisions during fast-paced interactions with heavy objects. This innovation aims to tackle the disparity between robotic execution speed and human-like agility in various scenarios.
Traditionally, the robotics community has prioritized collision avoidance in robotic design. The I.AM project, however, challenges this convention by shifting the focus to “collision exploitation.” This approach seeks to optimize quick and efficient movements when handling heavy items, while maintaining reliability despite potential disturbances or inaccuracies in object location or weight. For example, if a robot mistakenly predicts the weight of an object, or if an object is slightly misplaced, the goal is to ensure that it can still perform its task effectively.
Utilizing principles of physics—mass, friction, and the intricacies of force—along with sophisticated software simulations, researchers sought to bridge the gap between theoretical predictions and actual robotic behavior. An iterative testing cycle was implemented, enabling the development of algorithms that facilitate efficient control in real-time scenarios. This process has deepened understanding of how robots can be programmed to adapt quickly to physical challenges, demonstrating reliability even under unexpected circumstances.
Engaging in this research has brought to light the complexity of human movement and spatial navigation that we often take for granted. Human beings instinctively navigate their environments and make split-second decisions, a feat still at the cutting edge of robotics research. Developing hardware that can replicate such nuanced actions, or improve spatial perception and decision-making capabilities in real-time, remains one of the most significant challenges faced by researchers in the field.
The I.AM project also benefited from collaborations with industry leaders, notably VanderLande, a global player in logistics automation. Such partnerships have provided invaluable insights into the practical bottlenecks within the industry, enriching the research with real-world applications. The synergy between academic research and industry demands boosts the efficacy of both parties, paving the way for innovative breakthroughs.
The Netherlands has a storied history in the robotics domain, known for impactful contributions to medical robotics and intelligent automation technologies. The synergy fostered through the I.AM project is indicative of the country’s thriving robotics community, which is now recognized on a global scale. Saccon’s work, alongside his collaborators, has reignited interest in impact-aware robotics—a niche that has begun to attract international attention.
As the project nears completion, the team is eager to pursue further explorations into facets like rapid planning and real-time perception, as these areas were only partially addressed in their initial study. This continuity of research is crucial, not just for academic growth but also for fostering relationships with local and international companies, ensuring the lifelong learning of students and the evolution of collaborative projects.
Leaning into the future, the intersection of visibility and challenge brings a sense of excitement for Saccon and his team. The ongoing dialogue about the future of robotics is filled with potential, and each step forward promises to bring more innovative capabilities for machines. As the robotics landscape evolves, it is clear that the path ahead requires perseverance, ingenuity, and a commitment to continuous learning and adaptation.
Leave a Reply