Recent advancements in robotics are reshaping our understanding of how machines can interact with their environment. Researchers at the German Aerospace Center’s Institute of Robotics and Mechatronics have embarked on an innovative journey by integrating traditional internal force-torque sensors with sophisticated machine-learning algorithms. This groundbreaking study, published in the journal Science Robotics, diverges from conventional methods that often rely on artificial skin. By focusing on an internal sensing mechanism, the research team is redefining how robots perceive touch, creating more intuitive interactions with both their surroundings and humans.
The Two-Way Dimension of Touch
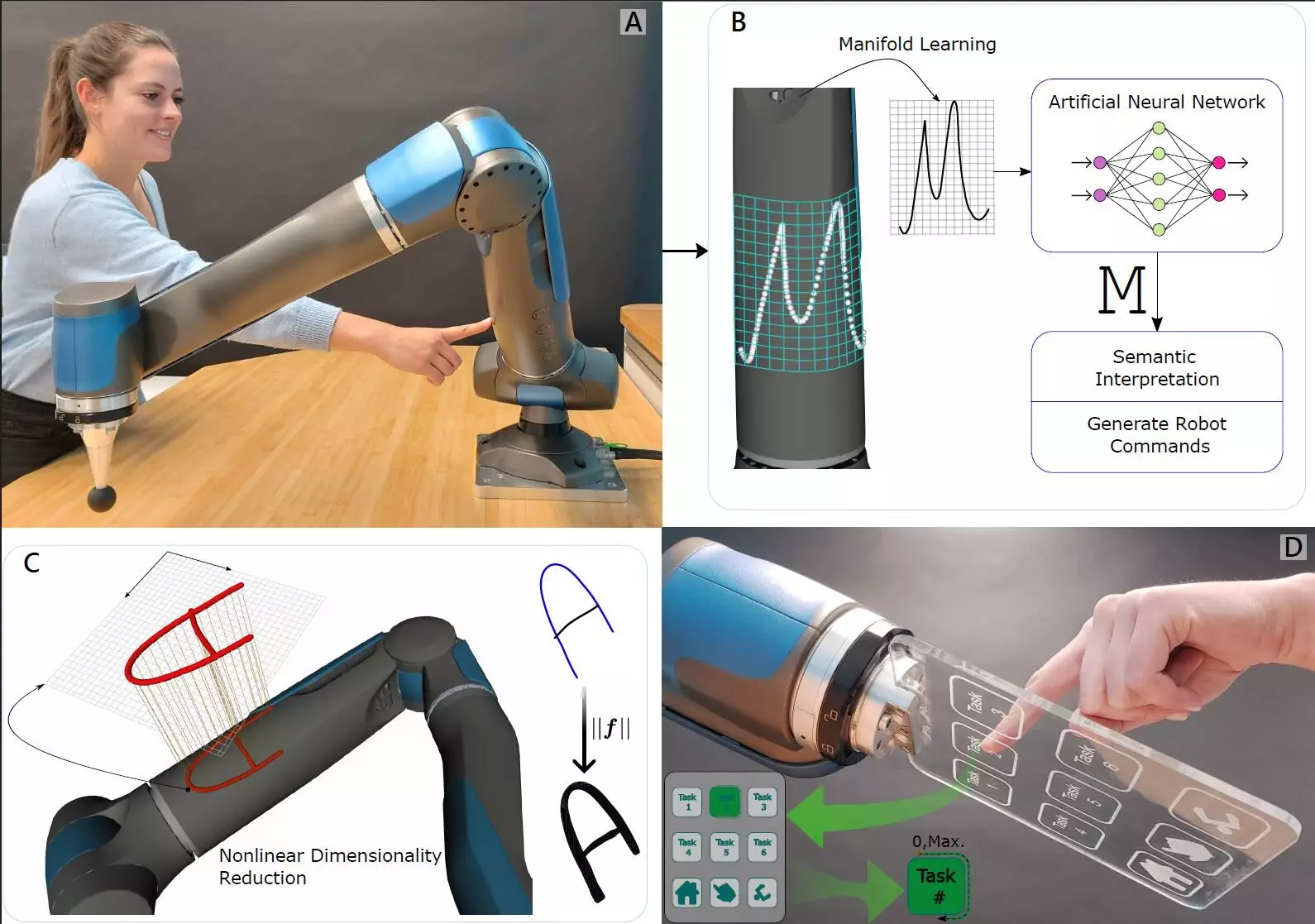
Touch is not merely a one-dimensional sensation; it involves a complex interplay of feelings experienced by both the toucher and the touched. Living organisms, for instance, interpret textures and temperatures when they make contact with objects, but they also experience sensations triggered by external forces acting upon them. The German research team recognized this dual aspect of touch. They focused on replicating the tactile experience from the perspective of being touched by implementing a system that prioritizes internal sensing, specifically through torque and pressure.
Harnessing Torque for Enhanced Sensitivity
Central to the study is the innovative use of force-torque sensors strategically placed in the joints of a robotic arm. These sensors provide a multifaceted view of the pressures exerted on the arm, capturing data from various angles simultaneously. This capacity for nuanced detection allows the robot not only to ‘feel’ when external pressure is applied but also to process the direction and intensity of that pressure. By applying machine-learning techniques, the researchers taught the robot to decode this information effectively, turning raw sensor data into meaningful tactile feedback.
A Breakthrough in Human-Robot Interaction
One of the most compelling results of this research is the robot’s newfound ability to discern touch in different contexts. For instance, the robot can identify which number is being pressed on its arm, showcasing a level of responsiveness that surpasses previous robotic capabilities. This significant advancement points toward a future where machines can interact with humans in more sophisticated ways, particularly in industrial settings where robots and humans collaborate closely. The elimination of artificial sensory skins not only simplifies the design process but also reduces the costs associated with creating and maintaining such technology.
The Future of Sensory Robotics
This study represents a pivotal move towards creating more intelligent, responsive robotic systems that are capable of genuine interaction. It challenges the traditional boundaries of robotics by demonstrating that machines can have a more human-like sense of touch, enhancing their functionality in real-world applications. As industries evolve and the demand for collaborative robots continues to grow, this research could serve as a foundation for developing robots that are not just tools, but rather empathetic collaborators capable of understanding and responding to their human operators on a deeper level. The marriage of physical and sensory intelligence in robots opens doors to a future where human and machine interaction is seamless and intuitive.
Leave a Reply