In recent years, soft robotics has gained momentum, incorporating flexible, adaptable devices that differ significantly from traditional rigid robotics. Among these innovations, fabric-based soft pneumatic actuators (FSPAs) stand out due to their ability to deform in response to changes in pressure, allowing for a wide range of movements such as bending, twisting, and stretching. These devices are particularly beneficial for applications that require safe human interaction, including wearable technology and robotic assistive devices. However, the design and production of FSPAs have often been marred by complexities due to the limitations associated with material properties and construction techniques.
The recent work highlighted in a study published in Scientific Reports sheds light on an intriguing aspect of this innovation: the application of Turing patterns, derived from Alan Turing’s morphogenesis theory, to enhance the design process of FSPAs. Turing’s 1952 theory posits that stable patterns in nature can emerge from simple initial conditions interacting through chemical reactions and diffusion processes. These patterns can manifest in various forms, including stripes, spots, and spirals, and have now inspired a method to improve the functionality and efficacy of FSPAs.
The research led by Dr. Masato Tanaka, Dr. Tsuyoshi Nomura, and Dr. Yuyang Song focuses on using Turing patterns to optimize how materials within the FSPAs deform, leading to enhanced control over their movements. This approach not only aims to simplify the creation of pneumatic actuators but also strives to reduce reliance on specialized materials that can inflate the cost and complexity of production.
The crux of this research lies in the concept of anisotropic materials, which have directional properties that can be manipulated to achieve desired movements and functions in soft robotics. The researchers utilized a gradient-based orientation optimization method to inform the arrangement of fibers within the fabric. This method draws from the principles of anisotropic reaction-diffusion systems, allowing for the generation of detailed Turing patterns that inform how the actuator’s fabric will behave under applied pressure.
For the research team, addressing the challenge of trial and error in material selection increased the efficiency of the design process. Conventional methods often required significant experimentation with isotropic materials, which can deform uniformly but lacked the capacity for controlled shape morphing. Through automation, as detailed by Dr. Song, the researchers bypassed these obstacles to produce actuators with precisely defined attributes, thereby streamlining the development of effective soft components in robotics.
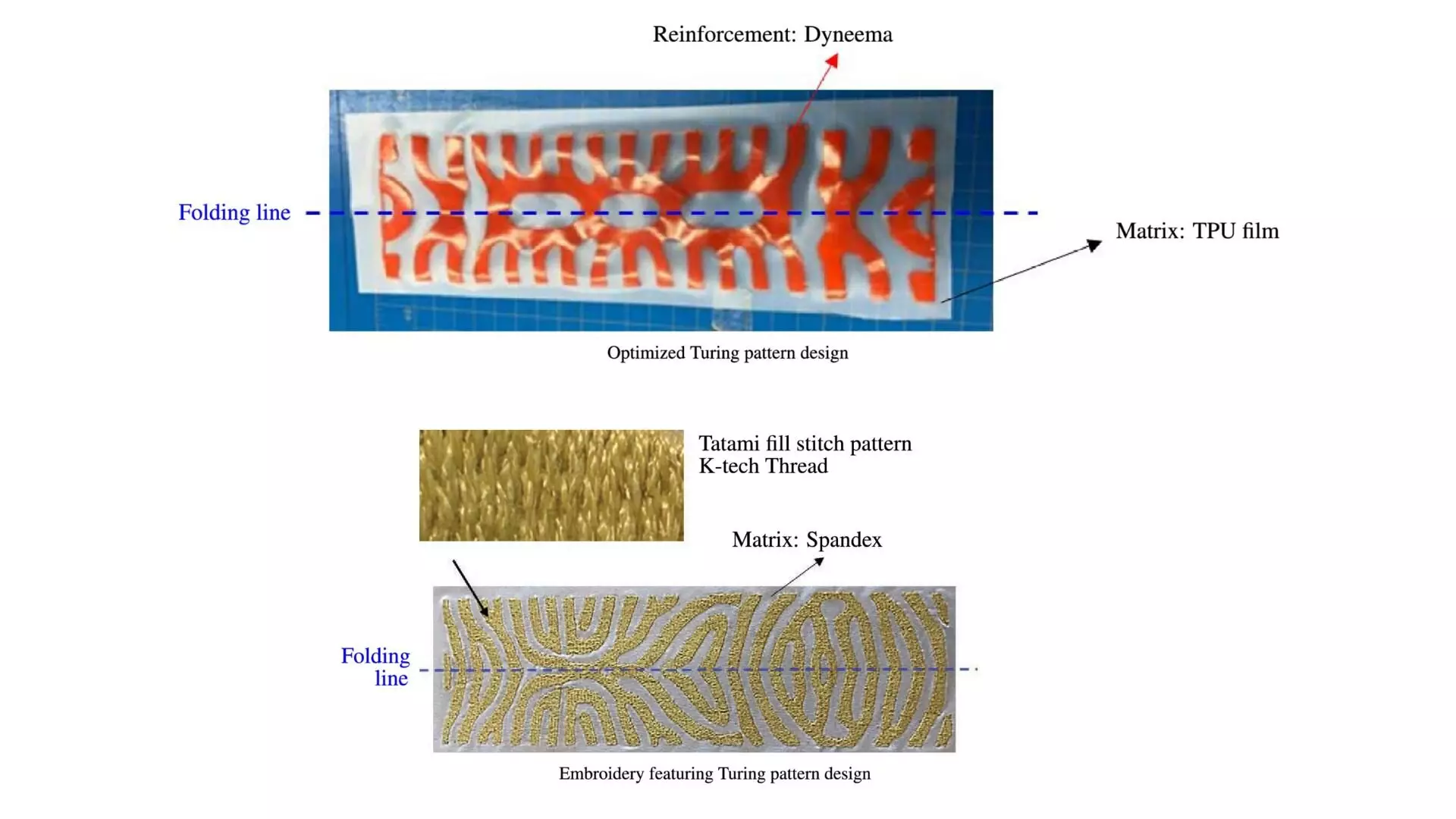
Creating these innovative FSPAs entails distinct fabrication methods—two of which emerged as notable highlights in the study. The first technique, heat bonding, involves using laser-cut, rigid materials like Dyneema to create Turing patterns that are thermally adhered to softer materials like TPU film. This method showcases a practical way to combine different material properties for enhanced functionality.
Conversely, the embroidery technique embeds the Turing patterns directly into softer fabric using a stiff thread. This dual approach highlights the researchers’ focus on both performance and cost-effectiveness in the manufacturing process, positioning their designs as scalable solutions in the evolving field of soft robotics.
In practical applications, the team compared their Turing pattern-based designs against traditional layouts, demonstrating notable improvements in performance metrics. For instance, they revealed that C-shaped designs using Turing patterns exhibited a 10% reduction in actuator edge spacing compared to conventional designs. Such advancements open the door to more dynamic and versatile actuator capabilities.
The implications of this research extend far beyond the immediate applications of FSPAs. As articulated by the research team, future investigations could incorporate advanced materials such as shape memory polymers and electroactive substances, potentially elevating the functionalities of soft actuators. Moreover, the exploration of mass production techniques, including the possibility of 3D printing, promises to enhance the efficiency of fabrication processes while broadening the accessibility and customization options in soft robotics.
The infusion of Turing patterns into the design of fabric-based soft pneumatic actuators presents a significant step forward in soft robotics. By embracing innovative methodologies and emphasizing scalable production, researchers are not only pushing the boundaries of technology but also paving the way for safer and more adaptable robotic systems to integrate seamlessly into everyday life. The pursuit of enhanced actuator dynamics, alongside ongoing developments in material science, holds the promise of a new era in robotics—one defined by flexibility, safety, and creative potential.
Leave a Reply