In the realm of robotics, one of the most significant hurdles is enabling machines to efficiently navigate complex environments. Humans can seamlessly adapt their movement to retrieve objects from shelves or navigate around various barriers with an instinctive fluidity that appears effortless. However, the underlying cognitive processes that allow for this smooth interaction with the environment are extraordinarily sophisticated. Efforts to replicate this human ability in robots have revealed the complexities of motion planning, a crucial challenge that involves ensuring that a robot can move from one point to another without colliding with obstacles. Unlike humans, who can adjust their movements dynamically based on real-time feedback, robots often struggle in unfamiliar surroundings, leading to inefficient, time-consuming, and resource-intensive processes.
Carnegie Mellon University’s Robotics Institute has made significant strides toward addressing these challenges with the introduction of Neural Motion Planning, an innovative system designed to enhance robotic adaptability in unpredictable settings. This approach utilizes state-of-the-art artificial intelligence to enable robots to engage in motion planning across a variety of unstructured household environments—think cabinets, dishwashers, and even chaotic rooms filled with toys and decor. As noted by Murtaza Dalal, a doctoral student at the Robotics Institute, the need for robots to operate in settings where prior knowledge is minimal often renders traditional motion planning algorithms ineffective. The slow pace at which traditional algorithms operate—often requiring thousands of collision checks—affects the usability of robotic systems in real-world applications.
Neural Motion Planning addresses these limitations effectively by leveraging a data-driven strategy. The model draws on humans’ natural ability to gather experiences and gradually hone their skills, transitioning from cautious and hesitant movements to quicker and more agile maneuvers. This method does not merely rely on pre-programmed responses; instead, it allows robots to function dynamically in changing environments, enhancing their capability to adapt when performing tasks involving object handling.
Simulating and Training in Diverse Environments
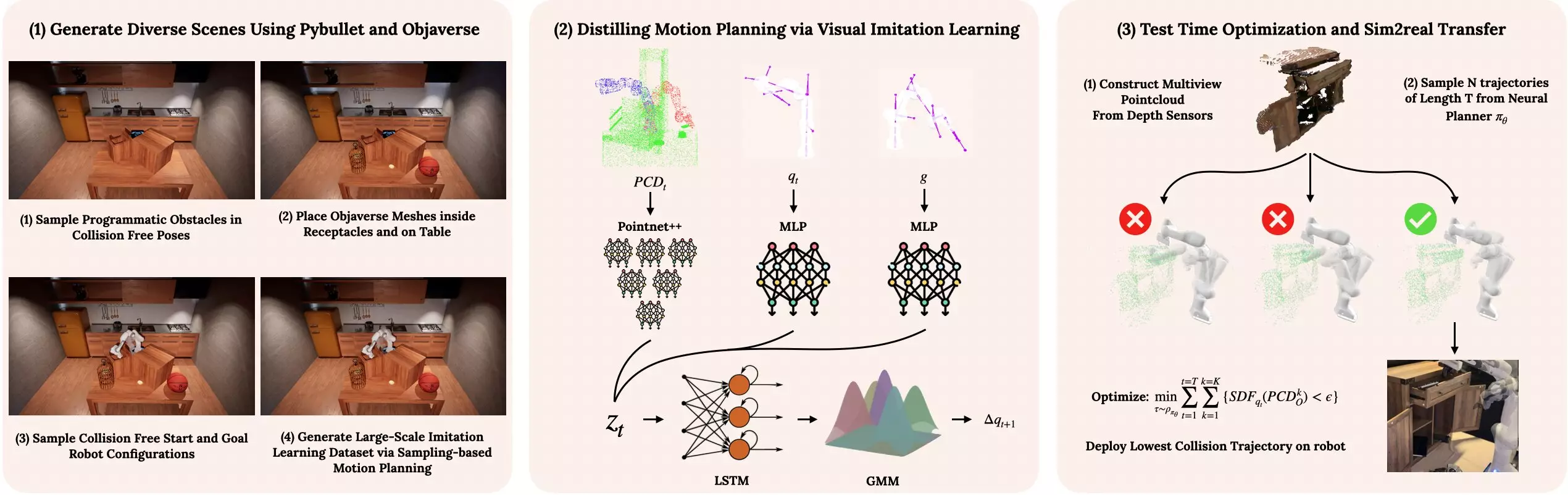
The foundation of Neural Motion Planning is built upon extensive simulations that replicate intricate household scenarios. Researchers introduced robots to a range of environments—furnishings, kitchen appliances, and movable items such as pets or flower vases. These diverse simulations were essential for training the system, enabling the robots to practice collision avoidance and agile motion planning. By distilling these experiences into a generalist model, the research team made significant advancements in how robots can tackle real-world obstacles, even those they have not explicitly encountered during training.
The impact of these innovations is underscored by the parallels drawn with recent successes seen in large-scale learning within the fields of vision and language, akin to tools like ChatGPT. Deepak Pathak, a faculty member at the Robotics Institute, emphasizes that Neural Motion Planning marks a crucial step toward bridging gaps in robotics, particularly in allowing machines to generalize their learning across different scenarios, regardless of the variations in backgrounds and arrangement.
Real-World Applications and Observations
Testing Neural Motion Planning on robotic arms within laboratory settings has yielded promising results, showcasing the technology’s ability to navigate unknown environments efficiently. Equipped with three-dimensional data captured via depth cameras, the robotic system is presented with specific endpoints to navigate towards. The real-world applicability of this research was evidenced when the robot deftly maneuvered around obstacles ranging from furniture to miscellaneous household items.
As observed by Jiahui Yang, a master’s student at the Robotics Institute, the performance of Neural Motion Planning in real-time scenarios is both thrilling and encouraging. Robots are not just following scripted motions; they exhibit an impressive ability to avoid diverse impediments in their paths while executing designated tasks. This level of adaptability and precision showcases the potential applications of Neural Motion Planning beyond the laboratory, suggesting that future implementations could lead to more sophisticated robotic assistants capable of assisting in various domestic tasks.
The efforts at Carnegie Mellon University signify more than just progress in motion planning; they represent a vital shift toward creating intelligent robotic systems. As research continues to unfold, the integration of neural networks for navigation opens new avenues for enhanced robotic capabilities. With ongoing advancements, we can anticipate the development of robots not only limited to well-structured tasks but also skilled in fluid interactions in ever-changing environments. This transference of skills from human cognition to machine application could revolutionize how we rely on robots in everyday life, making them indispensable allies in domestic and industrial landscapes alike.
Leave a Reply