Robotic technology has made significant advancements in recent years, with the aim of assisting humans in various everyday tasks. One key area of focus in this field is the development of robotic grippers that can effectively manipulate different types of objects. A recent study by researchers at Improbable AI Lab and Massachusetts Institute of Technology (MIT) introduces a new two-finger robotic gripper designed to improve everyday manipulation tasks.
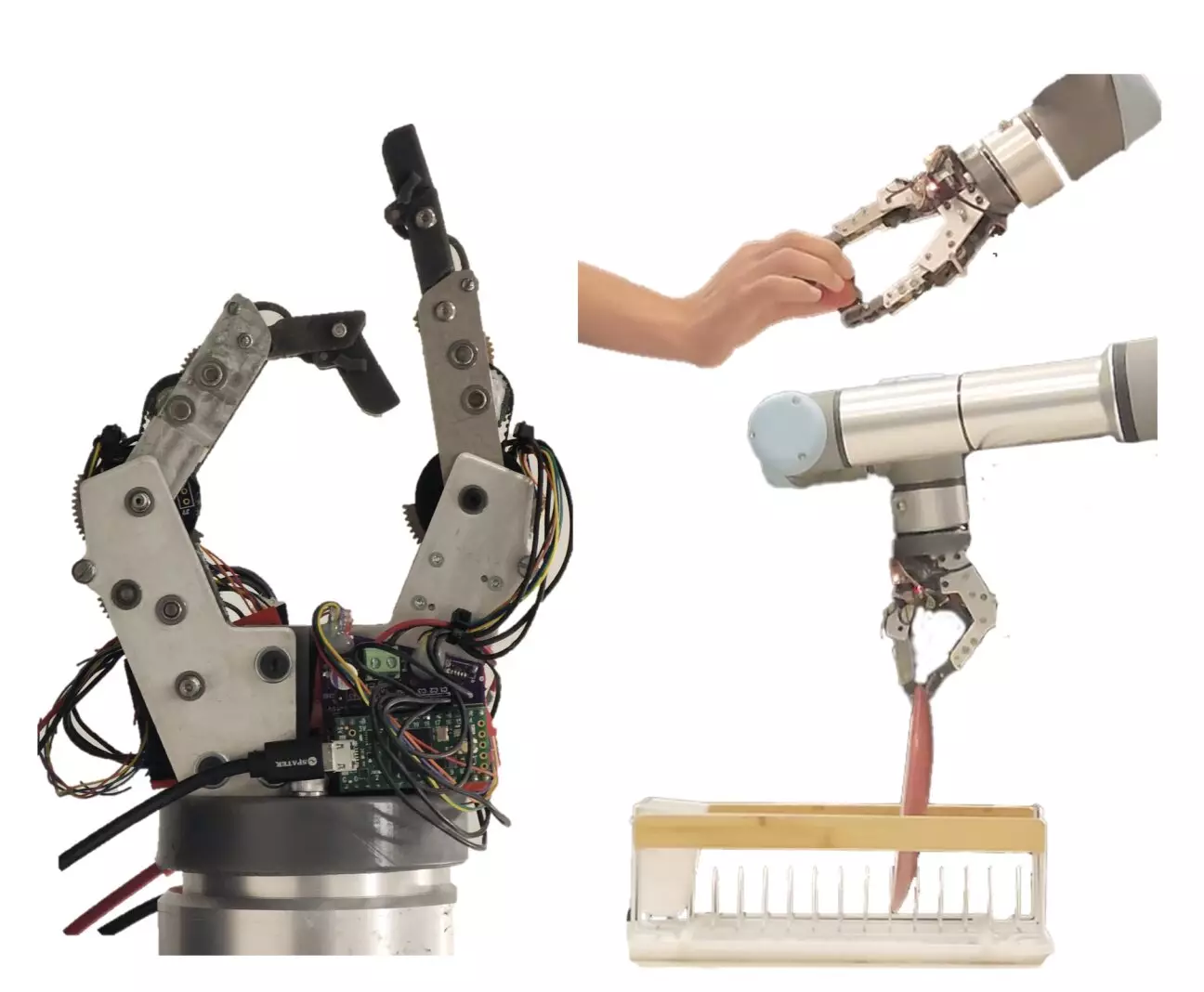
The robotic gripper developed by the researchers features a structure with two robotic fingers that closely resemble human fingers in size and shape. These fingers are designed to bend and grasp objects with varying shapes and textures efficiently. The team’s goal was to create a gripper capable of performing simple daily tasks, such as picking up objects and placing them in specific locations.
While the current gripper has two degrees of freedom (DoF) due to the use of only two robotic fingers, the researchers aim to expand the design to include more fingers in the future. They acknowledge that adding additional DoF may increase the size of the gripper, making it challenging to accommodate five fingers on a single hand. However, they remain hopeful that advancements in actuator technology may enable the development of grippers with three or four fingers in subsequent iterations.
To evaluate the performance of their two-finger gripper, the researchers conducted a series of real-world experiments. These experiments focused on assessing the speed, compliance, and force applied by the gripper when completing basic “pick-and-place” tasks. The team tested the gripper’s ability to handle tasks such as placing dishes in a rack, picking up delicate objects like strawberries, and grasping thin and flat items like paper.
The real-world experiments yielded promising results, with the two-finger gripper successfully completing all three basic tasks. While these tasks may seem elementary, they reflect activities that humans engage in daily. The performance of the gripper in these tasks suggests its potential for use in basic household robots. Moving forward, the researchers plan to further refine the gripper’s design and evaluate its performance across a wider range of everyday tasks.
Overall, the development of robotic grippers like the one created by the researchers at Improbable AI Lab and MIT holds significant promise for the future of robotics in daily life. As technology continues to advance, the potential applications of dexterous robotic systems in assisting humans with various tasks are vast. By addressing current limitations and exploring new possibilities, researchers can pave the way for more sophisticated and efficient robotic manipulators in the years to come.
Leave a Reply